 |
 |
Ancient History
 As
a boy in the 50's the normal way to "make things" was using Meccano or
Balsa wood, and the ability to make the finished model do anything was
limited to controls linked by physical tethers such as the steel wires
of a control line model aircraft. The idea of being able to
use
radio control was almost in the realm of science fiction, so not
surprisingly that became a childhood dream. As
a boy in the 50's the normal way to "make things" was using Meccano or
Balsa wood, and the ability to make the finished model do anything was
limited to controls linked by physical tethers such as the steel wires
of a control line model aircraft. The idea of being able to
use
radio control was almost in the realm of science fiction, so not
surprisingly that became a childhood dream.I was very fortunate to attend a secondary school that had a superb engineering facility with two rooms full of lathes and pillar drills (and even one milling machine) as well as a working forge and foundry area, so as the years went by I started to make build more ambitious projects. When fourteen I finally set about realising the dream of radio control by building my own system from plans, but as this was the days before the semiconductor it ended up being built using "valves" with a transmitter that had to stand on the ground due to its 12 foot tall aerial and 100 plus Volts of batteries. The receiver was the size of a large paperback book, and also needed very high voltage batteries to operate, but worst of all I could never get an operating range of more than a few feet so it was never of any practical use. The next step happened when I started college, (OND in Engineering), which was a "sandwich" course alternating 6 months at college with 6 months in industry. As well as enjoying the huge workshops and facilities of the college the first 6 month industrial stint saw me placed in the AEC Trucks factory near Southall where I worked with their apprentices. However the instructors soon noticed that I and my fellow college group were already "up to speed" on workshop practices so we ended up being given almost free rein of the workshops to make as many tools etc. as we could (although everything still had to satisfy the instructors). Not only did this give me a lot of experience on all forms of workshop machinery, it also resulted in me making a lot of tools that I still use today. Then for the last four weeks with AEC we were sent on "work experience" sessions around the factory, and seeing the horrible conditions of a factory floor was a real eye opener. In fact it had so much influence on me that in the second college stint I decided to forsake my mechanical background and take up the much "cleaner" career of Electronic Engineering. With hindsight that may have been a mistake as I never lost my preference for mechanical things even though I spent my entire working life designing and testing electronic equipment. However, the stint at AEC did provide one big personal advantage in that it was paid employment with a take home pay of just under £5 a week. This meant that at the end of the six months I could finally afford to buy a commercial radio control system. By today's standards it was almost unbelievably primitive with just a single push button control on the transmitter, which was used to send a sort of "Morse Code" to the model. Push and hold the button and the model would turn left, release the button and the model would have a quick glitch to the right before going straight again. Push, release, and then push and hold the button; and the model would have a quick glitch to the left before turning to the right. Then release the button to go straight again. Finally, push, release, push, release, push and hold; this sequence would alternately start or stop the models motor if electric (or go slow or fast if it was an internal combustion engine). It's hard enough to write, but a real devil in reality to get the timing right to make the model do what you wanted. This simple system was the catalyst for about 20 years of making radio controlled models, and thankfully in a very short time the technology (and my skills in electronics) both increased to the point that full proportional control of every required model function became available. All that's happened since is that the technology has got better, more reliable, smaller, and cheaper. The photo at the top of the page shows one of my first really successful radio controlled models. Powered by a 2.5cc diesel engine it was really too fast for the original push button control, but once fitted with the new proportional control system it became a very good performer. And just in case you are wondering why it used a fast diesel engine instead of electric motors, the answer was simply that small batteries and electric motors just weren't available in the 60's. |
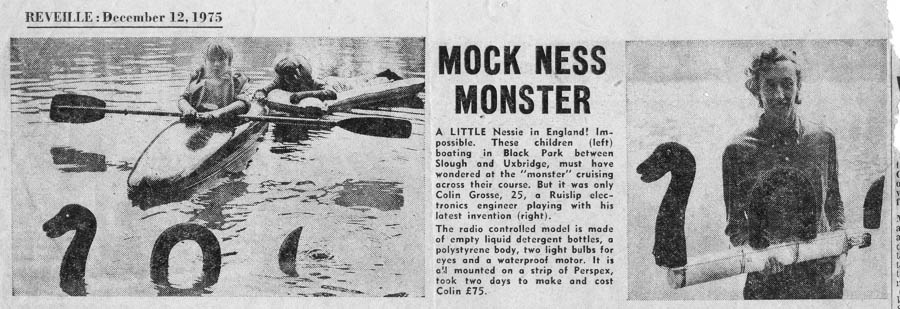 In
1971 my first unusual model was built to run on a pond at a village
fete and the newspaper clipping above shows the model four years later
when a newspaper reporter happened to see it running at the Black Park
Lake near Uxbridge. The body sections were moulded from "self
generating" foam and mounted on a Perspex sheet, below which was a
submarine style body made in best "Blue Peter" fashion from washing up
liquid bottles. With light up eyes and a very loud electronic
noise maker in its mouth (I was told that it sounded like someone
slowly strangling a duck) it was a rather unusual model for its time.
|
 By
the early 70's I had built and successfully competed with a large
number of diesel engine powered models, and in fact for several years
the entire family would decamp nearly every weekend to visit various
model boat clubs to take part in races. These were great fun,
but
probably somewhat antisocial events due to the noise of high revving
little engines, so it was quite nice to be able to adopt electric power
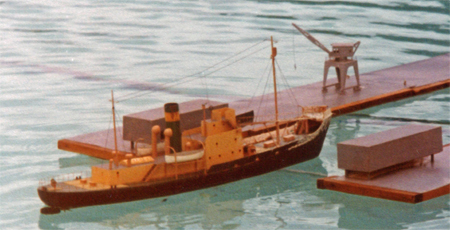
when suitable batteries and motors became available. The
photo on
the left shows a model whale catcher taking part in a navigation
competition in which the aim to was to complete the marked course
without hitting any of the marker buoys or other obstacles.
This
model was about 1 metre long (39 inches back then) and used the same
type of electric motor that today powers my steam raising blower for my
7 1/4" gauge steam locomotive Gentoo, with
an electronic speed control system designed by myself. By
the early 70's I had built and successfully competed with a large
number of diesel engine powered models, and in fact for several years
the entire family would decamp nearly every weekend to visit various
model boat clubs to take part in races. These were great fun,
but
probably somewhat antisocial events due to the noise of high revving
little engines, so it was quite nice to be able to adopt electric power
when suitable batteries and motors became available. The
photo on
the left shows a model whale catcher taking part in a navigation
competition in which the aim to was to complete the marked course
without hitting any of the marker buoys or other obstacles.
This
model was about 1 metre long (39 inches back then) and used the same
type of electric motor that today powers my steam raising blower for my
7 1/4" gauge steam locomotive Gentoo, with
an electronic speed control system designed by myself.Due to my career in electronics I was able to make models that were smaller, and generally worked better, than many other competitors; so it wasn't really a surprise that I often received criticism about my small models making it too easy to win the navigation competitions (small models effectively have wider gaps to squeeze through). The result was that I started building models of rather unorthodox prototypes that appeased my fellow competitors because of the appalling handling characteristics that they had. |
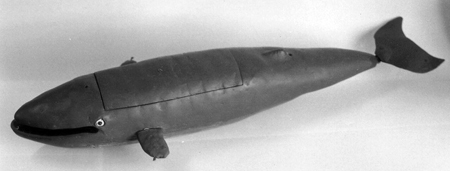 It's
probably hard to think of anything more unorthodox than a model of a
Blue Whale, but the London Model Engineering exhibition was then being
held in the Seymour Halls which had an indoor swimming pool on which we
demonstrated model boats. Since I already had the model whale
catcher, having a whale to display with it in the clear waters of the
swimming pool seemed like a good idea. The result was a 16"
long
model submarine that was intended to resemble the whale, complete with
glowing LED eyes and a centrifugal water pump to enable it to "spout".
The propeller was recessed into a duct underneath the whale's
belly, with a folding rudder fitted so that the whale could be winched
up the ramp of a (unfortunately
never completed)
factory ship. The whale was ballasted to only just float so
that
once moving the large
tail acted as an elevator control to allow the
whale to dive and be controlled under the water. The two
dorsal
fins were spring mounted so that once harpooned the whale catcher could
get alongside the whale and tow it backwards using a small hook on the
whale's tail to take the whale to the factory ship ramp ready to be
winched onboard. It's
probably hard to think of anything more unorthodox than a model of a
Blue Whale, but the London Model Engineering exhibition was then being
held in the Seymour Halls which had an indoor swimming pool on which we
demonstrated model boats. Since I already had the model whale
catcher, having a whale to display with it in the clear waters of the
swimming pool seemed like a good idea. The result was a 16"
long
model submarine that was intended to resemble the whale, complete with
glowing LED eyes and a centrifugal water pump to enable it to "spout".
The propeller was recessed into a duct underneath the whale's
belly, with a folding rudder fitted so that the whale could be winched
up the ramp of a (unfortunately
never completed)
factory ship. The whale was ballasted to only just float so
that
once moving the large
tail acted as an elevator control to allow the
whale to dive and be controlled under the water. The two
dorsal
fins were spring mounted so that once harpooned the whale catcher could
get alongside the whale and tow it backwards using a small hook on the
whale's tail to take the whale to the factory ship ramp ready to be
winched onboard.This tiny submarine worked very well for many years and always pleased the spectators (especially when it spouted at them), but eventually met an untimely end when my brothers cat knocked it off the workbench and damaged the tail beyond repair. Possibly a fitting end for a "fishy" model. However the regular visits to various model exhibitions with boating pools and the "need" to display radio controlled models took a group of friends and I into the realm of "staged events" where we used our models to show a convoy being attacked by a submarine, and more spectacularly a full scale commando assault on a beachhead using landing craft. If you would like to read about these models and their special pyrotechnic effects then please click here. |
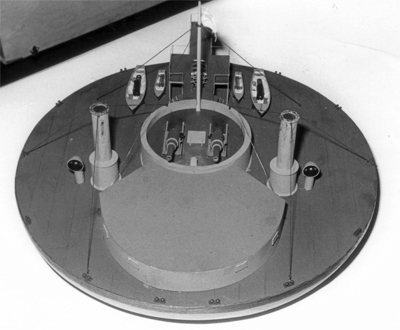 More
typical
of my weird models is the Novgorod shown in the photo
on the right. The inspiration for the model came from a book
I
found in a library which catalogued all sorts of strange vessels, in
this case a British built gun boat for the Imperial Russian Navy.
The theory was that the low freeboard would make it very
difficult for any enemy to hit, and its wide beam would make it so
stable that its own guns could fire much more accurately than the
opposition. What no one seemed to consider was that it
wouldn't
have any directional stability due to its circular shape. The
model, to match the full size craft, had six propellers but only a
single rudder and was powered by two electric motors. Each
motor
drove the three propellers on one side of the model via Meccano gears
and chain, and had its own speed controller. The rudder was
also
controlled by the radio control unit, but had no affect at all on which
way the model went ! The only way the model could be steered
was
by altering the speed of the motor on one side of the model to change
the way it pointed (rather like driving a tank), but like a hovercraft
the model would then continue to drift along in the old direction while
pointing in the new one for a while until it managed to set off in the
direction it was now pointing. With a beam of nearly 1/2 a
metre
and the almost total lack of control it should have silenced my fellow
competitors, but amazingly I still continued to win the navigation
events. We had to assume that my eyes were just better than
theirs when it came to judging distances. More
typical
of my weird models is the Novgorod shown in the photo
on the right. The inspiration for the model came from a book
I
found in a library which catalogued all sorts of strange vessels, in
this case a British built gun boat for the Imperial Russian Navy.
The theory was that the low freeboard would make it very
difficult for any enemy to hit, and its wide beam would make it so
stable that its own guns could fire much more accurately than the
opposition. What no one seemed to consider was that it
wouldn't
have any directional stability due to its circular shape. The
model, to match the full size craft, had six propellers but only a
single rudder and was powered by two electric motors. Each
motor
drove the three propellers on one side of the model via Meccano gears
and chain, and had its own speed controller. The rudder was
also
controlled by the radio control unit, but had no affect at all on which
way the model went ! The only way the model could be steered
was
by altering the speed of the motor on one side of the model to change
the way it pointed (rather like driving a tank), but like a hovercraft
the model would then continue to drift along in the old direction while
pointing in the new one for a while until it managed to set off in the
direction it was now pointing. With a beam of nearly 1/2 a
metre
and the almost total lack of control it should have silenced my fellow
competitors, but amazingly I still continued to win the navigation
events. We had to assume that my eyes were just better than
theirs when it came to judging distances. |
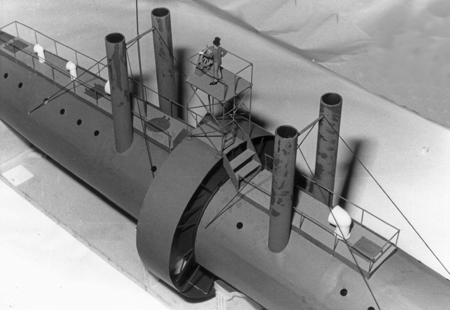 Next
up was a model of a "Cigar Ship" as originally built by the Winans
brothers who had started out as railroad engineers in the USA.
According to that library book they decided that a boat with
a
circular cross section would not roll so much in a lea seaway, and that
by making the ends taper to points above the waterline it would also
slice through waves without pitching up and down. At the time
the
boats were regarded as a disaster, but maybe they were just well ahead
of the times as in recent years there have been several attempts to
make wave piercing hull forms for full size racing boats. Next
up was a model of a "Cigar Ship" as originally built by the Winans
brothers who had started out as railroad engineers in the USA.
According to that library book they decided that a boat with
a
circular cross section would not roll so much in a lea seaway, and that
by making the ends taper to points above the waterline it would also
slice through waves without pitching up and down. At the time
the
boats were regarded as a disaster, but maybe they were just well ahead
of the times as in recent years there have been several attempts to
make wave piercing hull forms for full size racing boats.To compound their problems the Winans decided that on the version of the Cigar Ship I was to model they would use a huge turbine like paddle wheel that revolved around the centre of the hull to propel the ship. And if that wasn't problem enough it was to have two steam engines and boiler rooms, one in each hull half, without any form of ships engine room telegraph system. It must have been a nightmare for the helmsman perched on his scaffold like tower, being covered in smoke from the forward funnels, trying to shout engine commands to his two engine rooms; and all while steering the ship with a rudder at either end that would do nothing until the ship was moving at speed. With its circular cross section being in the vertical as opposed to the horizontal plane this was a natural follow up model to Novgorod, and once again it should have appalling handling. In practice the model took many years to complete, simply because I had to wait for suitable materials and parts to become available to build it. Despite being almost 2 metres long it had a very small displacement of around a Kilo, so the skin ended up being made from 5 thou thick polystyrene sheet to save weight. On the water it behaved very well, and still won navigation competitions, as it steered well once moving. The only problem being that it was impossible to manoeuvre slowly when docking. |
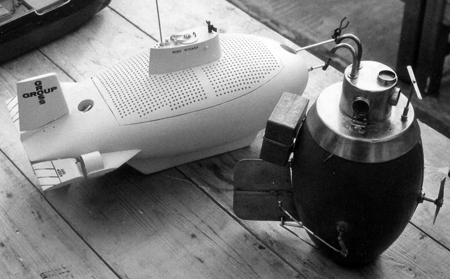 The
photo on the right shows two radio controlled model submarines built
(if I remember correctly in 1978) at the annual Berrylands Regatta
which was always held at an open air swimming pool. The model
of
Bushnell's Turtle was built by a friend of mine (Tom Andrews) and
although built to be capable of diving it proved to move so slowly that
it was impossible to steer. The other model was my
representation
of a research deep submersible based on the full size American vessel,
the Deep Quest. Rather like the Blue Whale mentioned earlier
it
was about 16" long and built to have very little reserve
buoyancy
so that the two vertical thrusters could be used to make it dive.
The two horizontal thrusters also had their own speed
controllers
so that the model was incredibly manoeuvrable, and it was regularly
operated at depths of 12 feet (the deep end of most swimming pools) at
which depth the two headlights could be seen to be illuminating the
water in front of the model. Surprisingly the model was also
capable of performing a vertical loop like an aeroplane ! The
photo on the right shows two radio controlled model submarines built
(if I remember correctly in 1978) at the annual Berrylands Regatta
which was always held at an open air swimming pool. The model
of
Bushnell's Turtle was built by a friend of mine (Tom Andrews) and
although built to be capable of diving it proved to move so slowly that
it was impossible to steer. The other model was my
representation
of a research deep submersible based on the full size American vessel,
the Deep Quest. Rather like the Blue Whale mentioned earlier
it
was about 16" long and built to have very little reserve
buoyancy
so that the two vertical thrusters could be used to make it dive.
The two horizontal thrusters also had their own speed
controllers
so that the model was incredibly manoeuvrable, and it was regularly
operated at depths of 12 feet (the deep end of most swimming pools) at
which depth the two headlights could be seen to be illuminating the
water in front of the model. Surprisingly the model was also
capable of performing a vertical loop like an aeroplane !The model was eventually sold to Slough Radio Controlled models who went on to sell a much simplified version of it as a basic kit. |
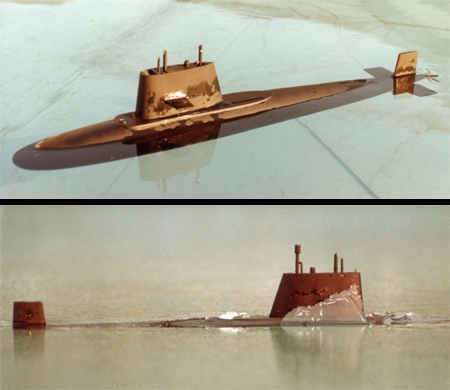 Over
the years I build a huge number of models besides those shown on this
page, but this small submarine was the last and most complex of them
all. When built in 1981 the consensus was that model
submarines
needed to be 2 meters or more in length in order to work
satisfactorily, yet this little model was only 690 millimetres long but
still had all the requisite controls including both main and trim
ballast tanks. It was a "free lance" design (not based on any
real vessel) but designed to look like the American nuclear powered
hunter / killer submarines. I named it the Walter S Winans
both
because that sounded similar to the way some American vessels were
named and because of the connection to my favourite weird model of the
Cigar Ship. Over
the years I build a huge number of models besides those shown on this
page, but this small submarine was the last and most complex of them
all. When built in 1981 the consensus was that model
submarines
needed to be 2 meters or more in length in order to work
satisfactorily, yet this little model was only 690 millimetres long but
still had all the requisite controls including both main and trim
ballast tanks. It was a "free lance" design (not based on any
real vessel) but designed to look like the American nuclear powered
hunter / killer submarines. I named it the Walter S Winans
both
because that sounded similar to the way some American vessels were
named and because of the connection to my favourite weird model of the
Cigar Ship.Just about everything in it was custom built, and like its full size counterparts it was very fast underwater. I also learnt a lot about how fast model submarines handle, in that it could be stalled in the same fashion as an aircraft and would roll into a spiral dive if cornered too hard at top speed. It was a truly superb little performer and could run rings around any other submarine model I ever saw. At the time the London Model Engineering Exhibition was held each year at the Wembley Conference Centre and another modeller and I spent many years out on an open roof area running the model boat pool for the exhibition organisers. In the shallow exhibition pool this submarine really was in its element as being the only model at the time that was small enough to operate successfully while submerged. In the freezing winters it also gave me a chance to run the model under the ice that frequently covered the pool, and the last photo shows the model surfacing vertically through the thin ice that it had previously been running beneath. Normally the model was run in ponds and lakes wherever model boat events were being held, which frequently meant that visibility under the water was non existent. On those occasions dives were somewhat worrying as you could not see what the model may have been about to get entangled with, and you could only navigate blind by understanding what the model should be doing. The final test of the model came when I had the chance to run it in a sonar test tank where I was working, and the model proved its capability by diving under full control to the bottom and then surfacing again. In that clear water test tank the Walter S Winans set its best ever dive depth of 16 feet (almost 5 metres). You may have heard that radio waves don't normally travel well under water, and reaching this depth with a standard 27 MHz radio control system certainly had many of my proffessional colleagues very puzzled. Click here to see more about this model. You can also download high resolution copies of the plans and photos for this model submarine. |
 To
finish this section we move from old history to the current date.
In all the years I had built radio controlled models I had
been
very competitive with boats and cars, and even managed a few aircraft,
but the helicopter was a model that I never managed to fly.
Back
in the 80's when I tried the models were still in their infancy and
very difficult to fly, so I suppose that it wasn't surprising that my
occasional dabble with them never got me very far before they crashed
and broke. To
finish this section we move from old history to the current date.
In all the years I had built radio controlled models I had
been
very competitive with boats and cars, and even managed a few aircraft,
but the helicopter was a model that I never managed to fly.
Back
in the 80's when I tried the models were still in their infancy and
very difficult to fly, so I suppose that it wasn't surprising that my
occasional dabble with them never got me very far before they crashed
and broke.Now 30 years later the technology has improved so much that for less £s than I spend then I can now buy helicopters that can be flown in my living room. These aren't the "toy" ones with two rotors one above the other (coaxial) which are very easy to hover but won't do much else. The little marvels like my latest one on the right are even capable of mild aerobatics and can fly at about 30 mph (so they can get from one end of the room to the other almost as quick as you can blink). Now when the weather is too cold and wet to be out with my Stafford steam loco or working in the unheated garage (workshop) I can at last fly the only type of radio controlled model that I never mastered in my younger days. |